
Fig. 3.
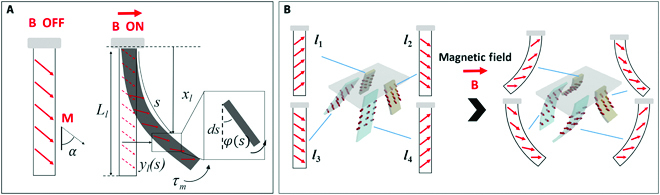
Elastic-magnetic bending model of the magnetic leg of the robot. (A) Deformation analysis of the flexible leg in the magnetic field. (B) Deformation analysis of the quadruped soft microrobot in the magnetic field.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Elastic-magnetic bending model of the magnetic leg of the robot. (A) Deformation analysis of the flexible leg in the magnetic field. (B) Deformation analysis of the quadruped soft microrobot in the magnetic field.