
Fig. 2.
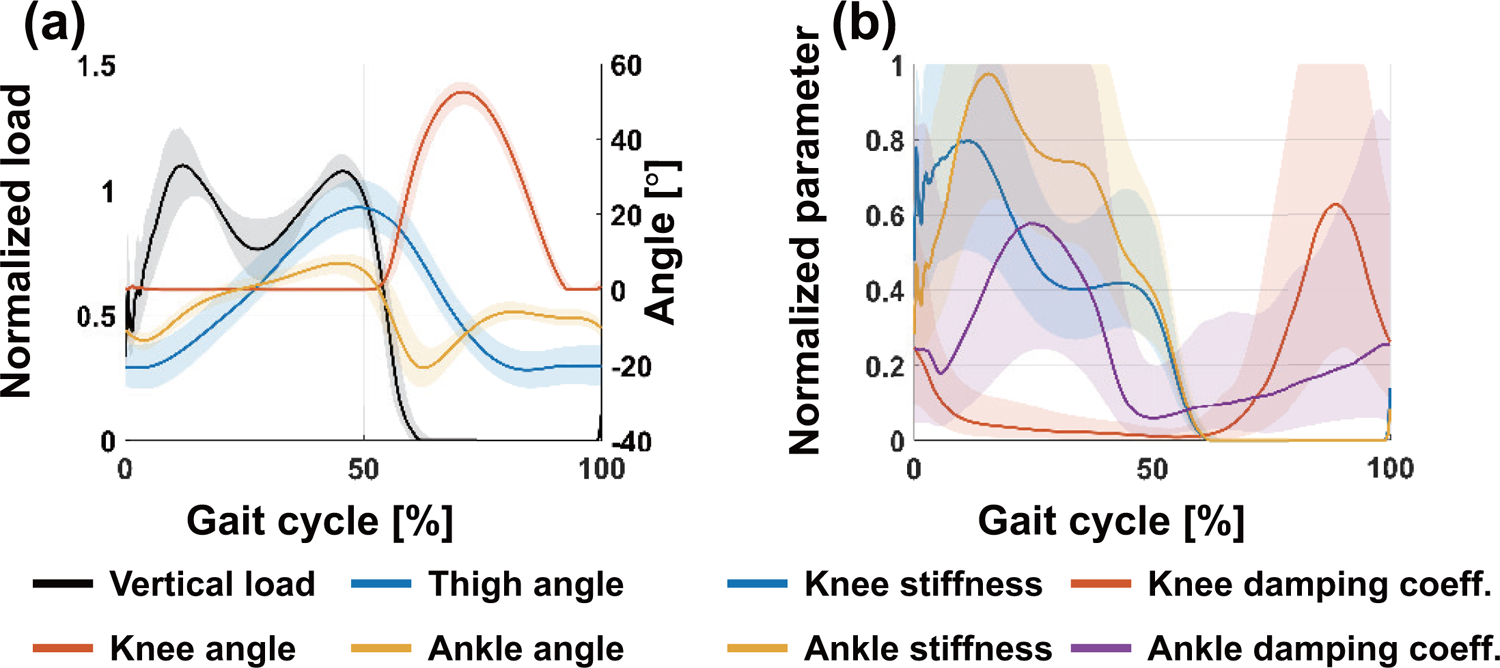
Gait trajectory (a) and corresponding stiffness and damping coefficient (b) were extracted from 22 non-disabled subjects. All plots show 75th and 25th percentiles in lighter bands.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Gait trajectory (a) and corresponding stiffness and damping coefficient (b) were extracted from 22 non-disabled subjects. All plots show 75th and 25th percentiles in lighter bands.