
Fig. 3.
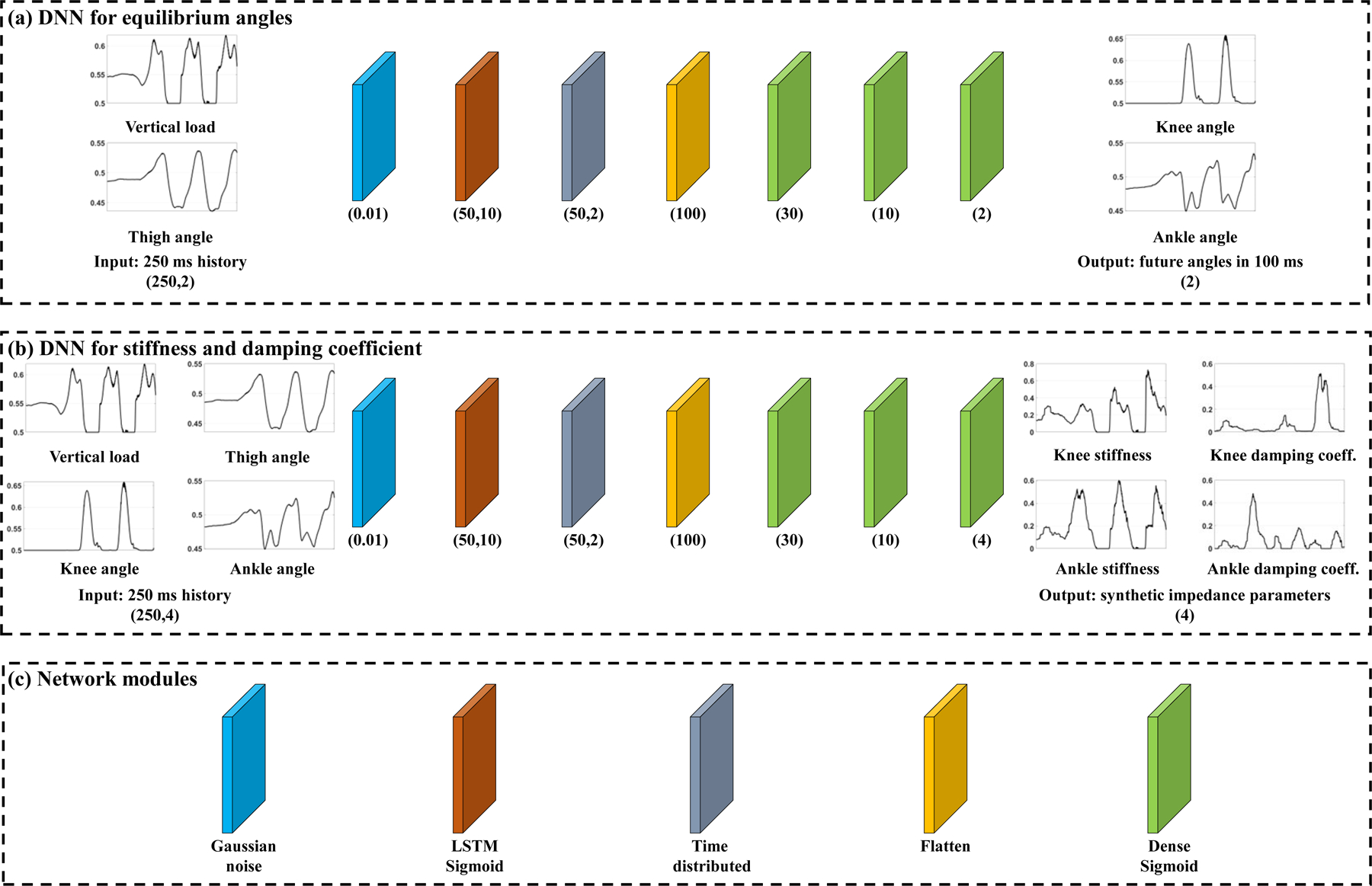
Architecture of the proposed system. In the case of the equilibrium angle (a), the model takes the history of the vertical load and thigh angle as the inputs. In the case of the stiffness and damping coefficient (b), the model takes the history of the vertical load, thigh, knee, and ankle angles. (c) The network modules represent the function of layers. The number in the brackets in a Gaussian noise layer represents the standard deviation of the noise distribution. The number in the brackets in the other modules represents the number of units in the layers (e.g., Dense (N) represents the Dense layer with N units.