
Fig. 1.
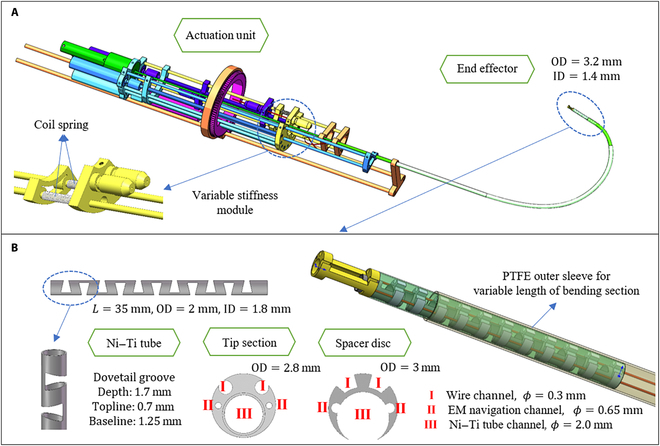
Mechanism design of the robotic bronchoscope system. (A) The overall system contains 2 parts: end effector and actuation unit. Coil springs are added to realize variable stiffness capability. OD, outer diameter; ID, inner diameter. (B) End effector is composed by Ni–Ti tube, tip section, and several spacer discs. PTFE outer sleeve is for the variable length of bending section capability.