
Fig. 2.
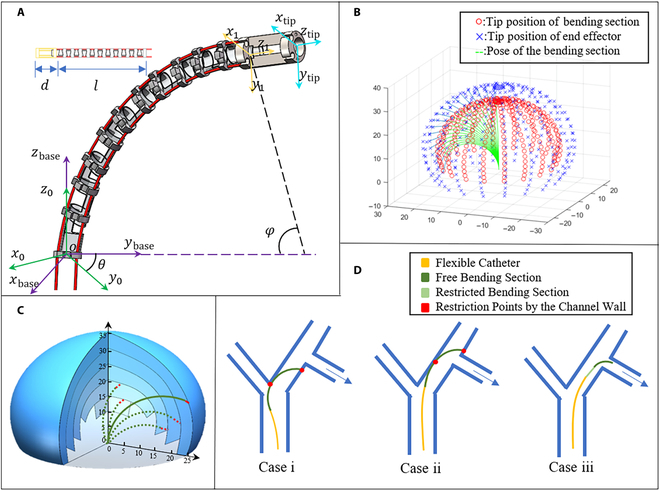
Kinematics and cavity passage capability analysis. (A) Kinematics model and coordinate systems. (B) Regular reachable workspace. (C) Augmented workspace by variable length of bending section capability. (D) Examples of robot posture in bronchus. Case i and ii, restricted by bifurcation and channel wall without certain capability; case iii, successful entry into target bronchus with certain capability.