
Figure 9.
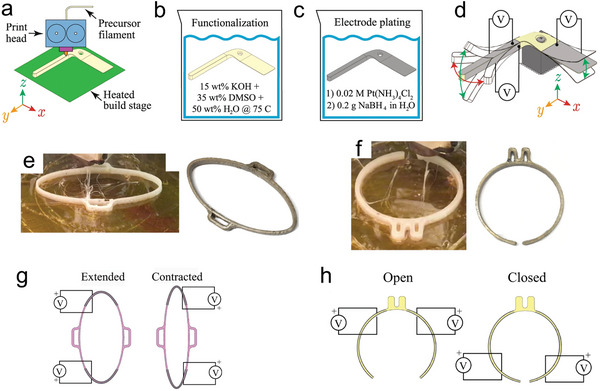
a) The printing of soft structures using precursors of ionomeric materials. b) Functionalization of the printed precursor structure. c) Electroless plating process. d) Multi‐DOF actuation of the customized actuator. e) 3D‐printed linear actuator component for modular robotic device. f) 3D‐printed gripper for the modular robotic device. g) The extension and contraction of the linear actuator. h) Open and closed states of the gripper.