
Figure 11.
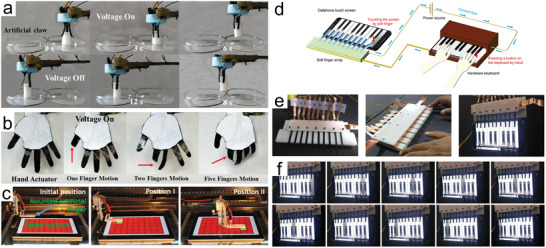
a) The artificial claw to grasp objects. b) Hand actuator to mimic finger motions. c) Soft robotic finger attached to a moving stage performing gentle touching task at designated positions on the fragile surface of a tablet. d) Schematic illustration of the working principle of the soft touch finger array for playing electronic piano applications. e) The hardware keyboard designed to control the finger array. f) Operation of all soft touch fingers for the “happy birthday” song. a,b) Reproduced with permission.[ 36 ] Copyright 2019, John Wiley and Sons. c) Reproduced with permission.[ 37 ] Copyright 2019, John Wiley and Sons.