
Figure 12.
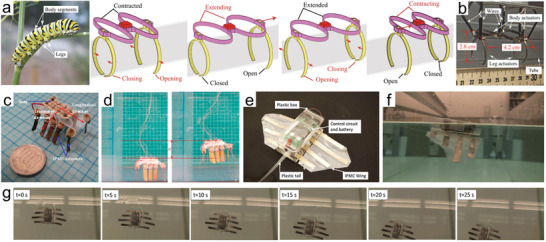
a) A 3D‐printed IPMC soft crawling robot inspired by a caterpillar and the schematic diagram of the crawling principle. b) Prototype of the 3D‐printed IPMC soft crawling robot. c) Prototype of the ten‐legged microrobot. d) The floating motion of the underwater microrobot in the water. e) A free‐swimming robotic manta with control circuits and battery. f) A snapshot of the free‐swimming robot (side view). g) The movement of the free‐swimming robot in water. c,d) Reproduced with permission.[ 132 ] Copyright 2012, Elsevier. e–g) Reproduced with permission.[ 133 ] Copyright 2011, Elsevier.