
FIGURE 1.
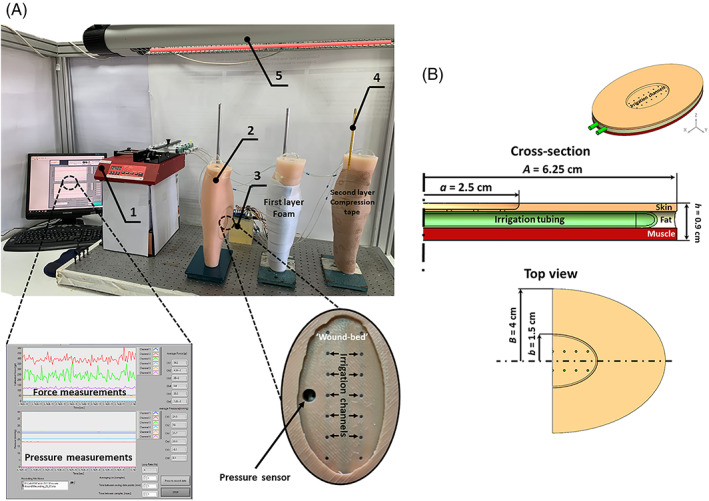
The robotic phantom system of venous leg ulcers (VLUs) (A): Experiments were conducted in three identical leg units, each including one lateral and one medial VLU at identical locations, shapes and sizes per anatomical position (upper frame). The setup consisted of: (1) Computer‐controlled syringe pump (the control panel of the LabView code developed for these robotic wound systems, showing the sensor readings in real‐time, is magnified in the bottom left frame); (2) Robotic wound systems (three identical leg units). (3) VLU simulator (magnified in the bottom right frame); (4) Thermometer; and (5) Infrared heating lamp for temperature control. The geometry of the VLU simulator (B) with its soft tissue simulant components. Dimensions A and B are halves of the length and width of the whole elliptically shaped VLU simulator unit, respectively, and likewise, dimensions a and b are halves of the length and width of the elliptically shaped wound‐bed part of the VLU simulator, respectively