
Fig. 4.
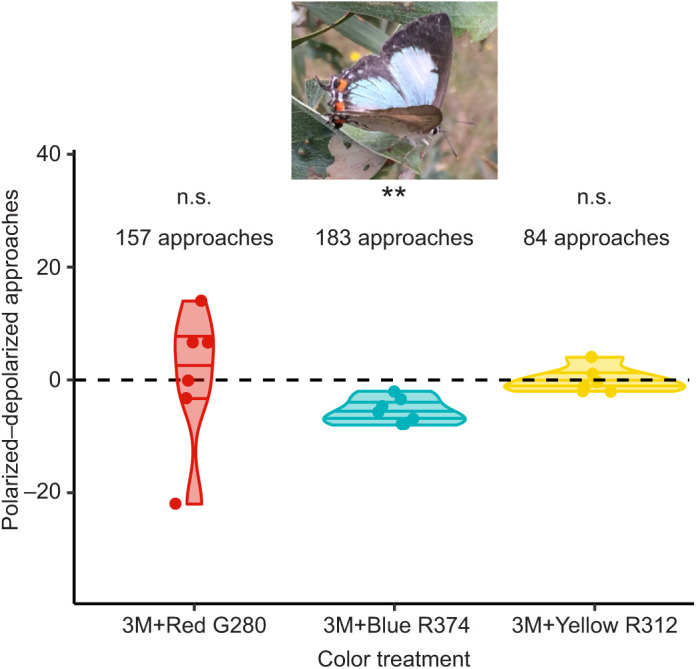
Difference between preferences of flying J. evagoras individuals to approach and inspect polarized and depolarized wing robot models. Butterflies preferentially approached the ‘blue’ (3M+Blue R374) wing beating robot that contained disrupted polarization content (Student’s t-test, t=−6.2185, **P=0.0008 for polarized−depolarized=0 at N=7 sites, 183 responses total), compared with those that had strong linear polarization. However, they showed no preference (Student’s t-test; n.s., not significant) for either ‘red’ (3M+Red G280, 157 responses total) or ‘yellow’ (3M+Yellow R312, 84 responses total) wing models (see Materials and Methods for additional specific color information). Points are the total number of polarized approaches minus the total number of depolarized approaches for each site, with zero denoted by the dashed horizontal line. Variability along the x-axis is random ‘jitter’ introduced to help separate points for visualization.