
Figure 2.
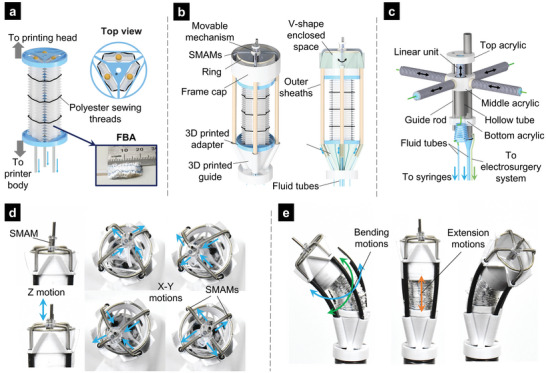
Detailed design of the slave manipulator of the F3DB. a) 3‐DOF soft robotic arm. b) Schematic illustration of the soft robotic arm and 3D‐printing head with an integrated nozzle at the tip. c) The movable mechanism consists of a linear unit in combination with the four SMAMs that can provide 3D motion for the nozzle. d) Motions of the nozzle integrated into the 3D printing head in three directions. e) Bending and extension motions of the robotic arm.