
Fig. 7.
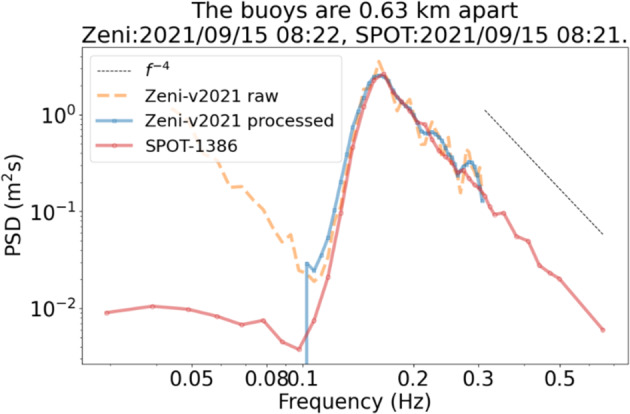
Validation of the instrument v2021 (Zeni-v2021 processed) against the Sofar Spotter (SPOT-1386), in open water, reproduced from38. The instruments were deployed close to each other, but drifted significantly with time. Agreement within typically 5% is obtained on most of the spectrum. The increasing, spurious noise at low frequencies observed in the Zeni-v2021, is a well known phenomena for IMU-based measurements of waves in ice in the open ocean (which results from the noise present in the Kalman filter attitude estimate under rough sea conditions, in combination with the intrinsic spectral noise background inherent to MEMS sensors, and the double integration corresponding to Eqn. (4); for more details, see83), which can be filtered out. This phenomenon is not expected to be present when performing measurements of waves in the sea ice.