
Figure 9:
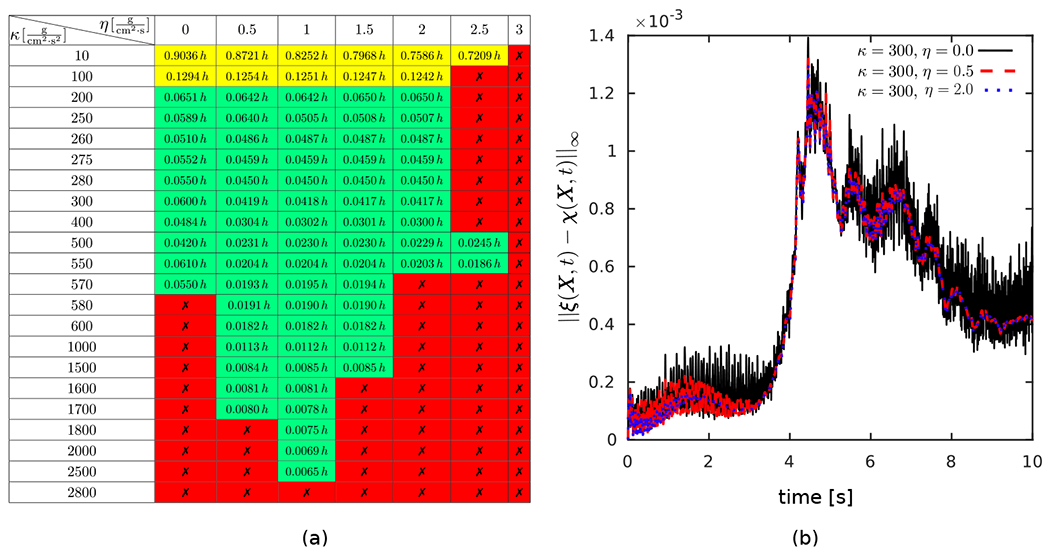
(a) A table of stable vs. unstable penalty pairs with red color cells marked by symbol showing unstable cases. The numbers reported for stable pairs is the maximum discrepancy between the two Lagrangian representations at , shown as a factor of Green cells are the acceptable cells with the additional condition of imposed in our simulations. Yellow cells show stable cases with maximum discrepancy larger than A non-zero damping parameter does not seem to be required to achieve a stable result with an acceptable maximum discrepancy. Additionally, note that there can always be a small enough time-step for which the currently unstable pairs would become stable. (b) The maximum discrepancy between the two Lagrangian representations over time for 3 cases from the table with fixed and different choices of . Although the oscillations are all smaller than , a small amount of non-zero damping is shown to further reduce spurious numerical oscillations.