
Fig. 1.
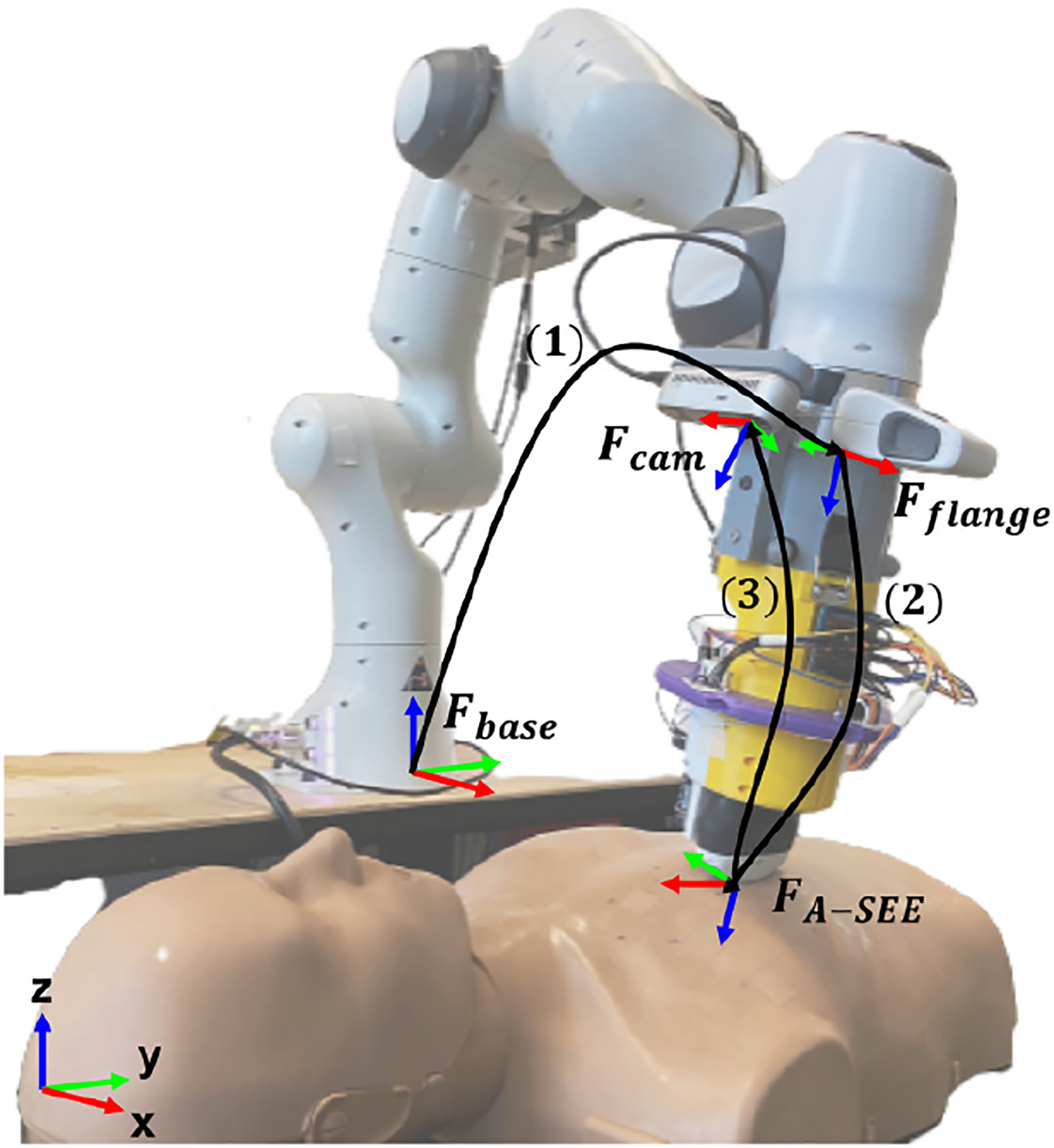
Coordinate frame convention for the proposed RUSS. Fbase stands for the robot base frame; Fflange is the flange frame to attach the end-effector; Fcam is the RGB-D camera’s frame; FA–SEE is the US probe tip frame; (1) is the transformation from Fbase to Fflange, denoted as ; (2) is the transformation from Fflange to FA–SEE, denoted as ; (3) is the transformation from FA–SEE to Fcam, denoted as .