
Figure 3. Craniobot control electronics:
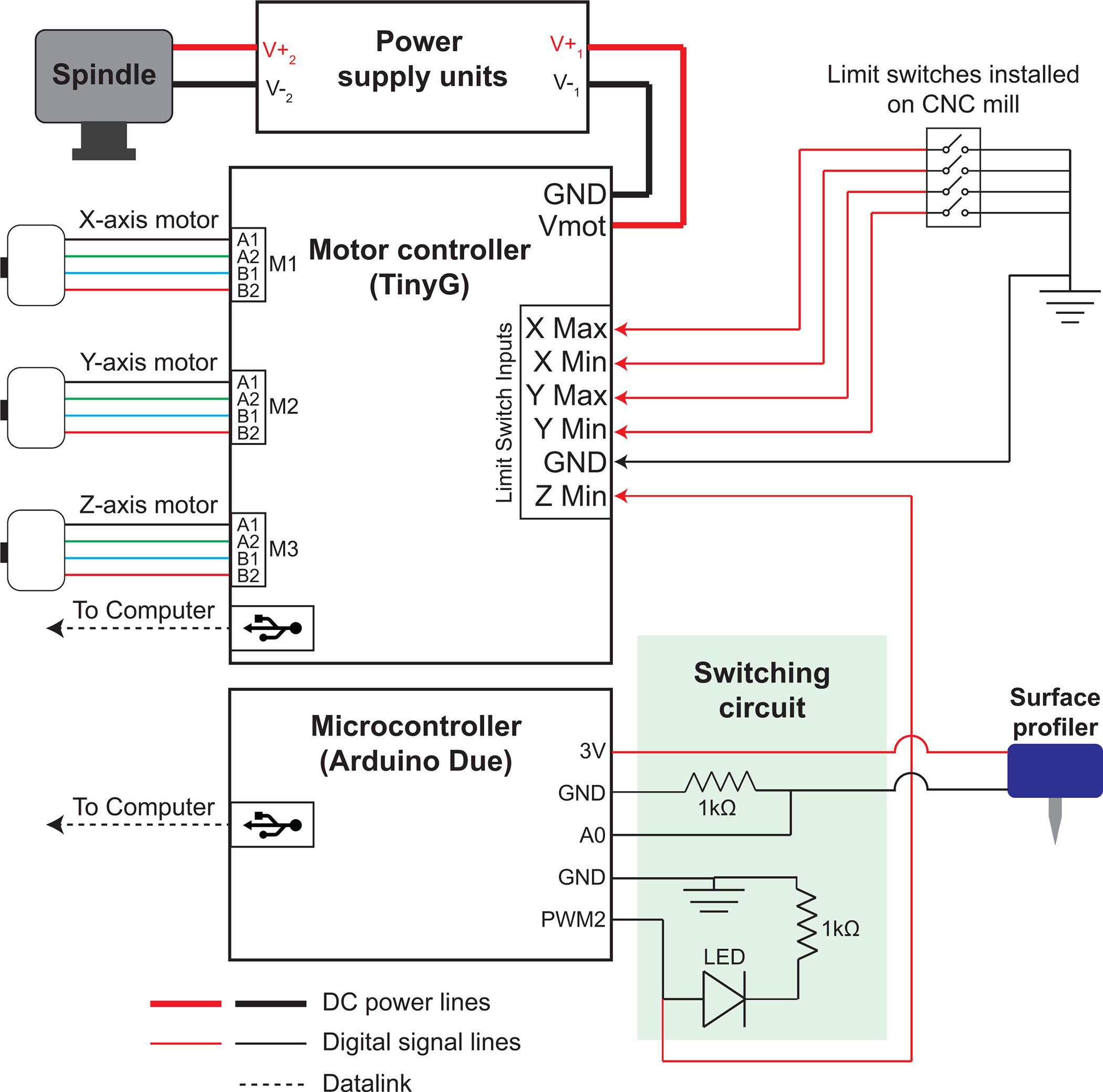
DC power supplies provide power to the CNC mill and the high-speed spindle. An open-source motor controller is used to drive the stepper motors in the x, y, and z directions. It connects to the computer via universal serial bus (USB) interface. Four limit switches, two each for the x and y axes to ensure the motors do not exceed the maximum travel range, are connected to the limit switch input terminals in the motor controller. One of the limit switch circuits in the z-direction is connected to an emergency stop button, and the other limit switch circuit is connected to the surface profiler via a switching circuit. A microcontroller is used to connect the surface profiler to the motor controller via the switching circuit.