
Figure 1:
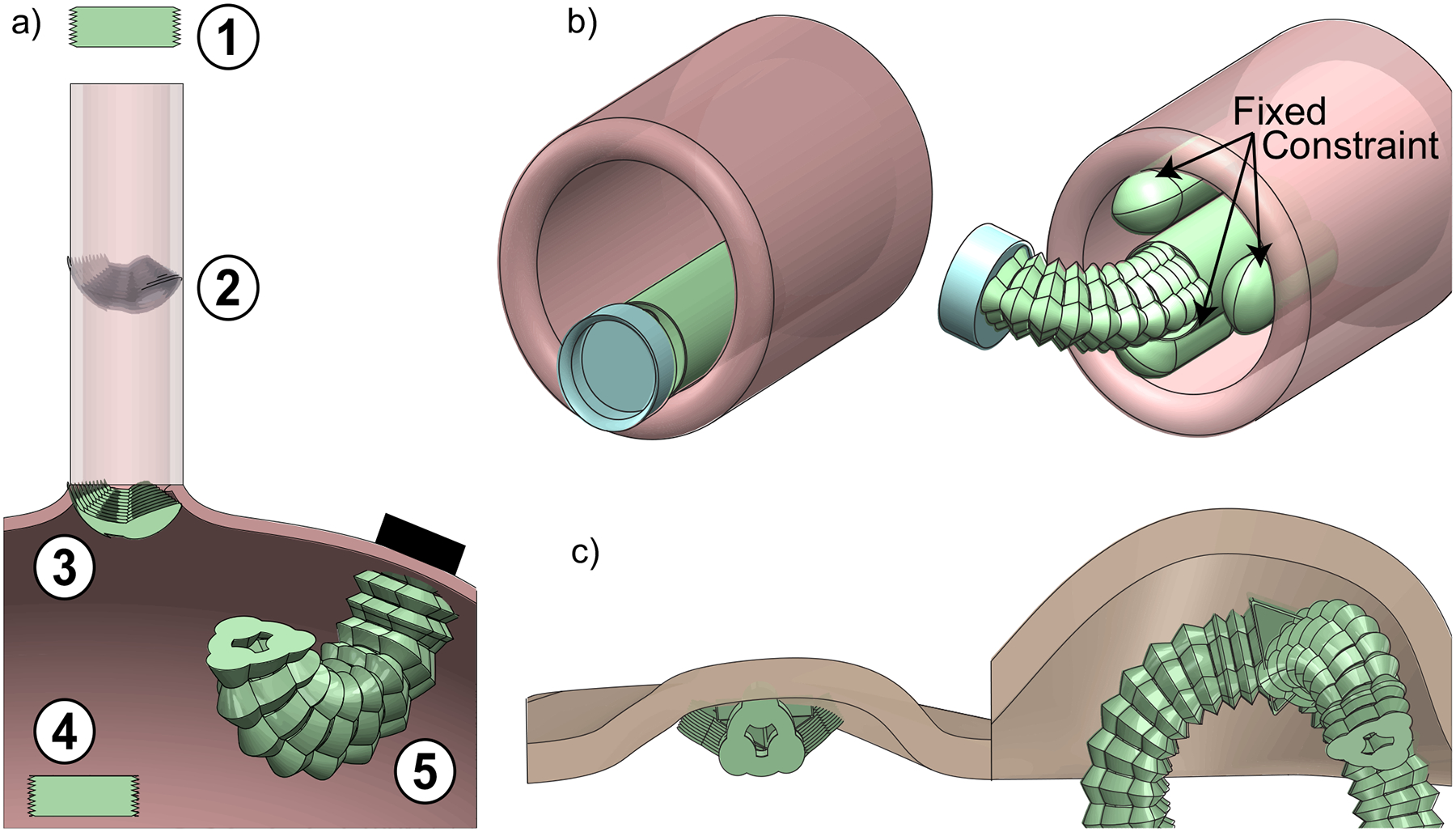
Scenarios enabled by the proposed SBAs. a) A 3-DoF SBA is deployed through a small tube (1–2) before emerging into a cavity (3–4) and magnetically fixing to the wall to manipulate the surroundings (5). b) A 3-DoF SBA is connected to an inflatable expansion mechanism to brace to a tube while grasping with a suction cup. c) A two-legged standing robot made of three 3-DoF SBAs starts flat in a collapsed environment and then expands to create its own workspace.