
Fig. 1.
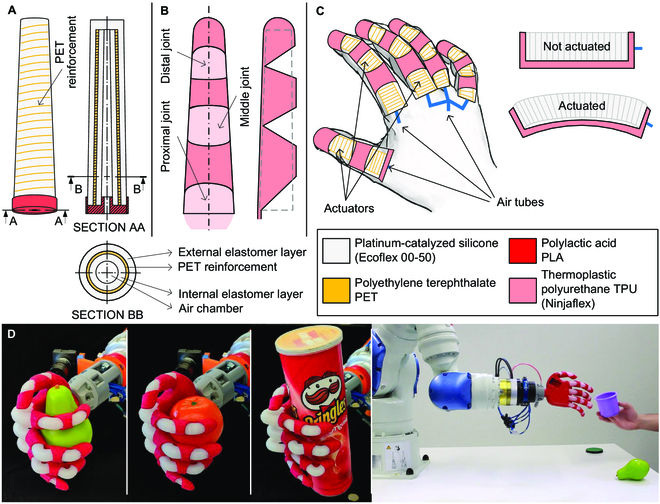
Design principles of the soft robotic hand. (A) Multimaterial finger’s soft actuator composed of 2 silicone layers and internal PET reinforcement. (B) Exoskeleton geometry of a single finger designed to bend in 3 joints (distal, middle, and proximal). (C) Operation principle where the pneumatic actuator inside a stiffer exoskeleton shell promotes the bending of the finger. (D) Attached to a robot manipulator, the soft robotic hand is capable of grasping and manipulating objects of various shapes, weights, and sizes.