
Figure 7.
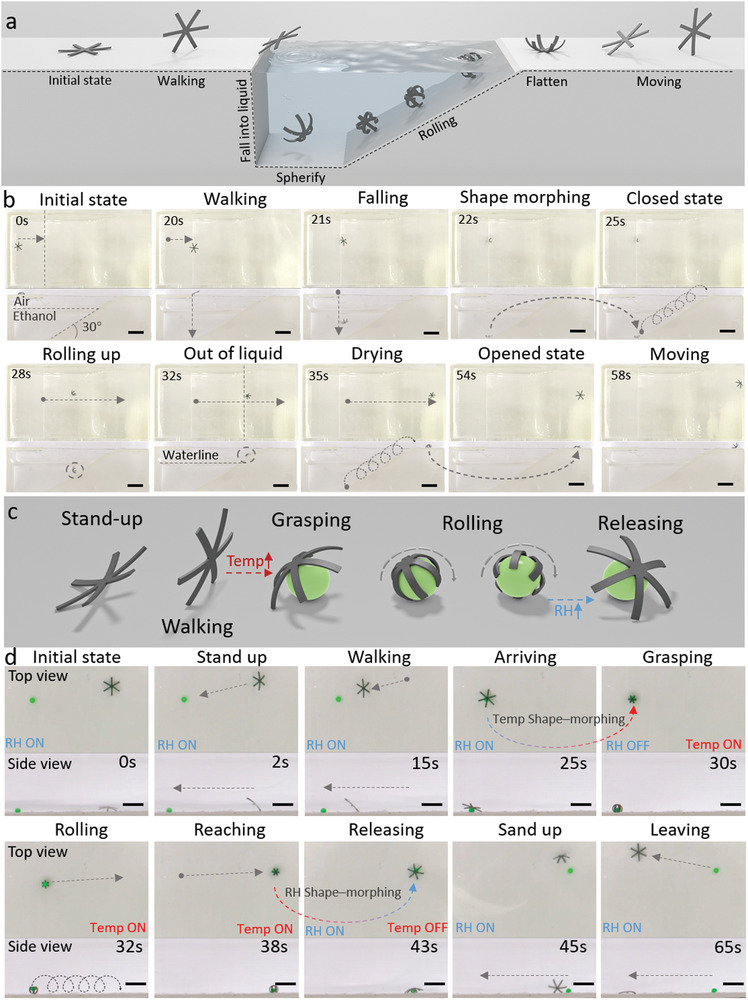
An untethered in situ reconfigurable MSR that can self‐adapt to different environments and terrains (air and liquid here) by exhibiting distinct locomotion modes. a) Schematic illustrations of different locomotion modes on a substrate in air and liquid exhibited by the MSR in response to external magnetic fields. b) Optical images from the top (top part in each row) and cross‐sectional (bottom part in each row) views of the MSR walking on a substrate in air and rolling by spherical structure inside a liquid. The shape morphing between these two locomotion modes is triggered autonomously when the MSR falls into the ethanol and the MSR can return to the flat sheet after moving out of the liquid. Scale bar: 6 mm. c) Schematics of different locomotion modes of the MSR, including walking, grasping, releasing, and rolling. The shifts between each motion were triggered autonomously by an increase in the environmental temperature and a decrease in the relative humidity. d) Optical images show the MSR walking to the target cargo, self‐grasping it (green ball diameter: 1 mm) in response to the environmental changes, transporting the cargo to the target area, releasing it, and retreating from the target area. Scale bar: 4 mm.