
Figure 6:
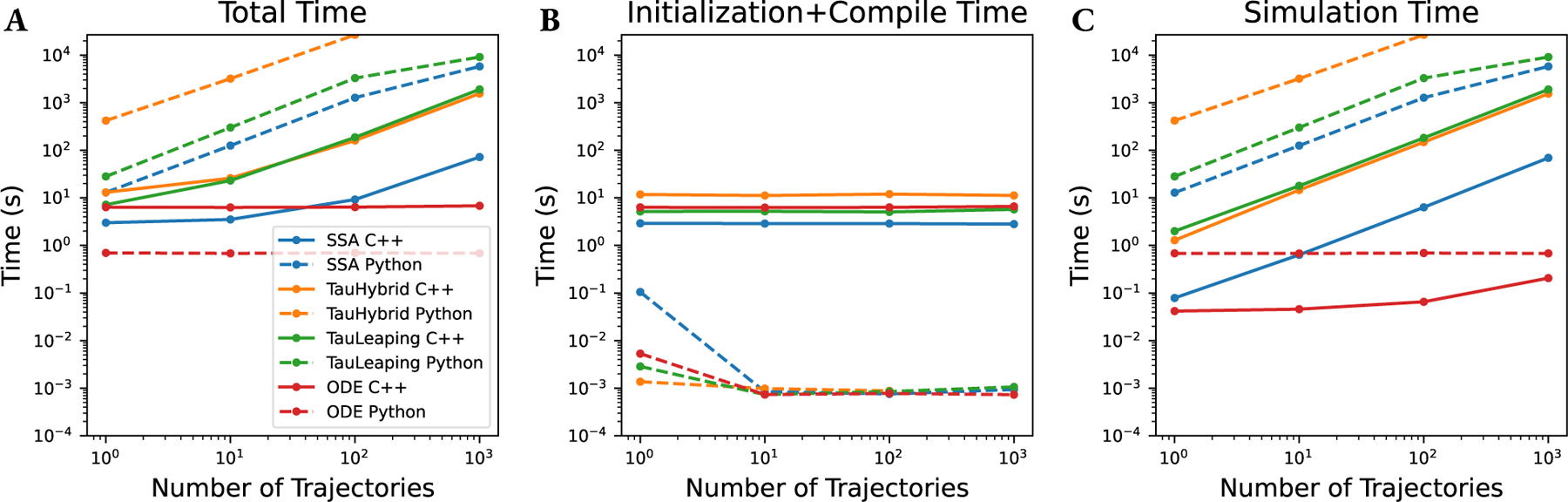
Performance analysis of GillesPy2 running the Vilar Oscillator (Vilar et al., 2002) model, showing (A) Total simulation time, (B) Compile time, and (C) Run time versus number of trajectories. Note that for the C++ solvers (solid lines), the compile time is a large fraction of the total time for fast-running simulations. The C++ solvers are all faster than their Python counterparts (dashed lines), however the relatively large compile time must be taken into account when considering the performance trade-offs of each solver.