
Figure 19.
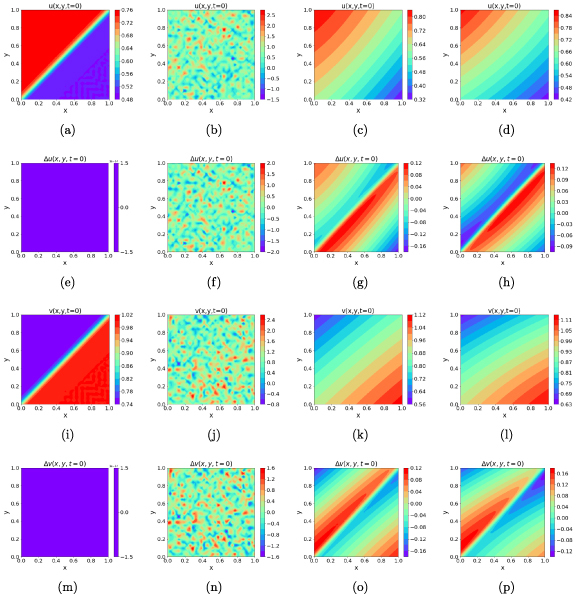
The initial condition for 2D Burgers’ equation for (a) error-free PINN, (b) noisy PINN without smoothing, (c) noisy PINN with GP smoothing, (d) noisy PINN with SGP smoothing. The figures in the second row show the error in PINN-evaluated solution at the initial timeslice for the corresponding architecture in the top row. The final two rows show the equivalent distributions for the field. Except the vanilla PINN (no error), all models were trained with data sampled from the initial timeslice corrupted with additive Gaussian noise with zero mean and σ = 0.5.