
Figure 1.
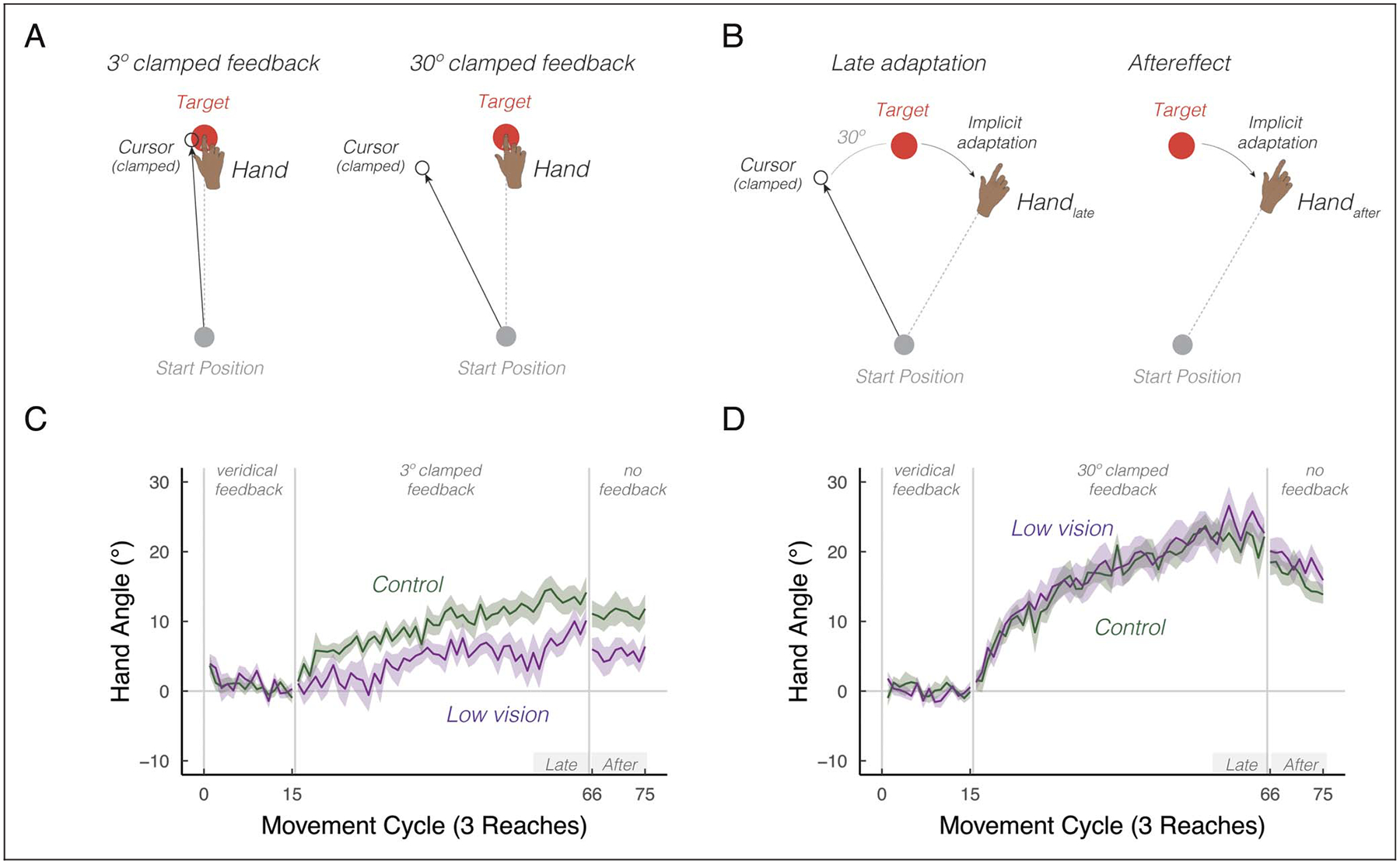
Intrinsic visual feedback uncertainty attenuates implicit adaptation in response to small, but not large errors. (A) Schematic of the clamped feedback task. The sensory prediction error—the difference between the predicted visual feedback location (i.e., the target, red circle) and visual feedback location (i.e., the cursor, white circle)—can either be small (3°) or large (30°). The cursor feedback follows a constant trajectory rotated relative to the target, independent of the angular position of the participant’s hand. The rotation size remains invariant throughout the rotation block. The participant was instructed to move directly to the target and ignore the visual feedback. A robust aftereffect is observed when the visual cursor is removed during the no feedback block, implying that the clamp-induced adaptation is implicit. Note that participants reached toward three targets: 30° (upper right quadrant), 150° (upper left quadrant), and 270° (straight-down). Only one target is shown in the schematic for ease of illustration. (B) We defined two summary measures of learning: late adaptation (handlate) and aftereffect (handafter). Late adaptation reflects the average hand angle relative to the target at the end of the clamped feedback block. Aftereffect reflects the average hand angle during the subsequent no-feedback block. (C–D) Mean time courses of hand angle for 3° (C) and 30° (D) visual clamped feedback, for both the low vision (dark magenta) and matched control (green) groups. Hand angle is presented relative to the baseline hand angle (i.e., last five cycles of the veridical feedback block). Shaded region denotes SEM. Gray horizontal bars labeled Late and After indicate late and aftereffect phases of the experiment.