
Figure 10. Soft Robotics for Sensing.
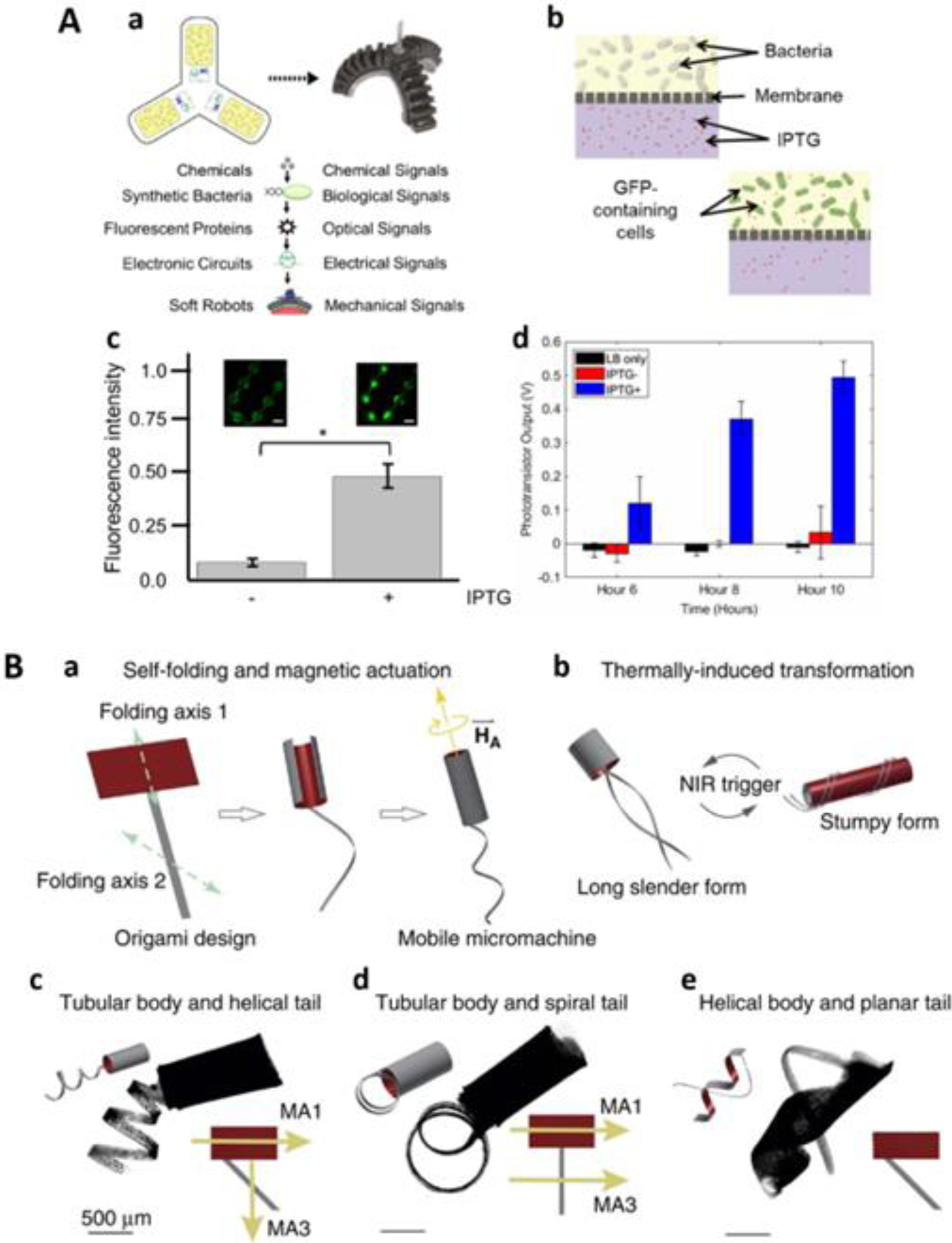
(A) A biosensing soft robot. (a) the sensing and actuation mechanism: the synthetic bacteria generated fluorescent protein upon external chemical signals, and the integrated electronic circuits will trigger pneumatic actuation upon the fluorescent signal. (b) the membrane contained pores that allowed the diffusion of chemical signals while retaining bacteria. (c) fluorescence signal from the sealed PDMS layer generated by chemosensitive bacteria in response to IPTG, scale bar: 3 mm. (d) photoresistor output over time in response to IPTG (reprinted from ref. 234 with permission, copyright 2019, The American Association for the Advancement of Science). (B) Programmable morphology of soft micromachine. (a) anisotropic swelling controlled by alignment of magnetic nanoparticle and selective patterning of supporting layers led to 3D structure. (b) upon NIR heating, the micromachine can transform the shape and apply different propulsion mechanism. (c) to (e) show the optical images of soft micromachines with different body shapes. MA1 and MA3 represents magnetic axis in head and tail. Scale bar: 500 m (reprinted from ref. 244 with permission, copyright 2016, Springer Nature).