
FIGURE 1.
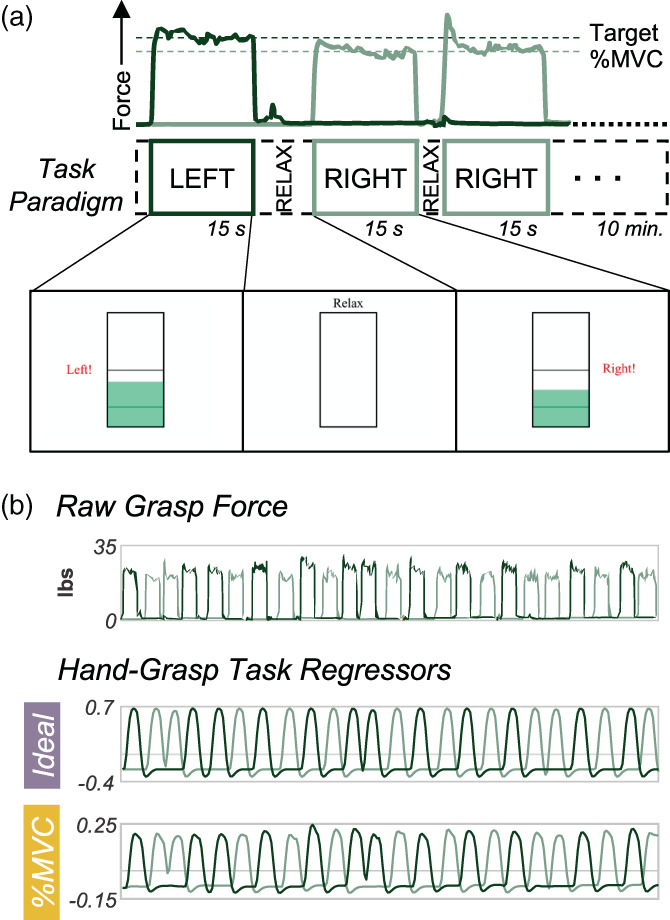
Hand‐grasping motor task and task regressors for fMRI modeling. (a) First three trials of task paradigm including the grasp force recording to a target %MVC and a representation of the real‐time visual feedback (i.e., moving green bar) as the participant is grasping during functional scans. (b) The unprocessed grasp force that is used for visual feedback and is recorded. (c) The two hand‐grasp task regressors: Ideal and %MVC. The Ideal regressor was modeled as a binary block design task, convolved with the canonical HRF, and demeaned. The %MVC regressor is the grasp force recording normalized to participant MVC, convolved with the canonical HRF, and demeaned. All panels are from the same example participant.