
Fig 1. Schematic of the block-catching task in the simulation.
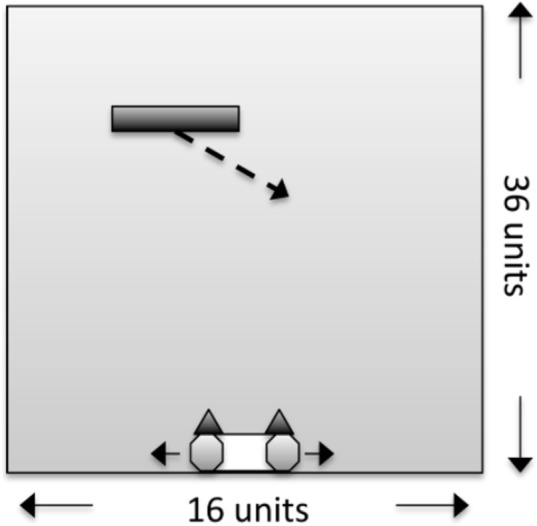
A block is falling from top to bottom, either towards the left or the right. The animat has two sensory nodes, which are activated when the block is above them. It also has two motor nodes, which allow it to either move to the right or left. Depending on the size of the block, the animat’s task is to either catch or avoid the block. Reproduced from [47].