
Fig. 14.
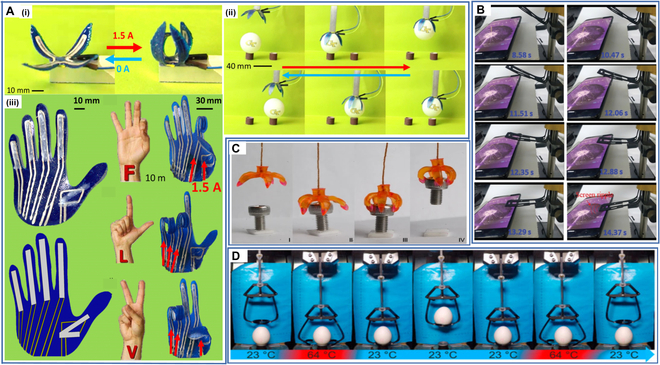
(A) (i) Four-hinge soft robotic gripper when a current of 1.5 A is applied (right) and when current is turned off (left), (ii) gripper picking and placing a ping pong ball with the current being applied in the top 3 images and turned off in the bottom 3 images, and (iii) printed hand with 5 LCE hinges for each of the 5 fingers and the formation of the letters F, L, and V by applying current to specific finger hinges to produce bending. Reproduced with permission from [172]. Copyright 2018 IOP Publishing. (B) The PISA was designed to mimic the ability of finger that could actively touch the screen. Reproduced with permission from [173]. Copyright 2020 Wiley-VCH. (C) The process of grabbing an object by a multimaterial soft robotic gripper. Reproduced with permission from [47]. Copyright 2016 Springer Nature. (D) The process of grabbing an egg by the soft robotic gripper. Reproduced with permission from [174]. Copyright 2021 Multidisciplinary Digital Publishing Institute.