
Figure 5.
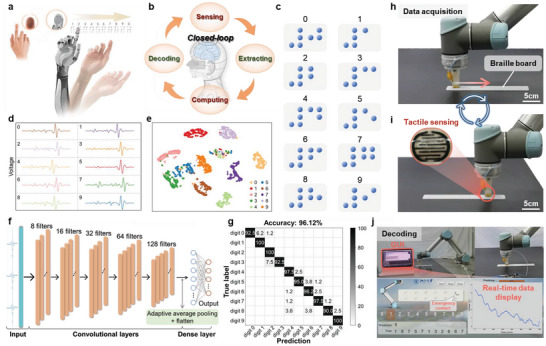
Dynamic decoding feedback of muiti‐point contact by assembling a tactile sensor on a robotic finger. a) Concept illustration of a recognition feedback system simulating finger perception. b) Close‐loop flow chart of a robotic sensing system that mimics human skin perception. c) Schematic of braille numbers from 0 to 9. d) Real‐time signals of ten braille numbers processed by a high‐pass filter. e) Dimensionality‐reduced clustering results of ten braille numbers. f) A 1D CNN model with 128 filters used for data classification. g) Classification results of ten braille numbers after 320 cycles of data acquisition. h,i) Real‐time data acquisition process of an 11‐digit braille phone number realized by a smart robotic finger. j) Real‐time signal feedback and display of recognition results of the braille phone number on a graphical user interface.