
Figure 1.
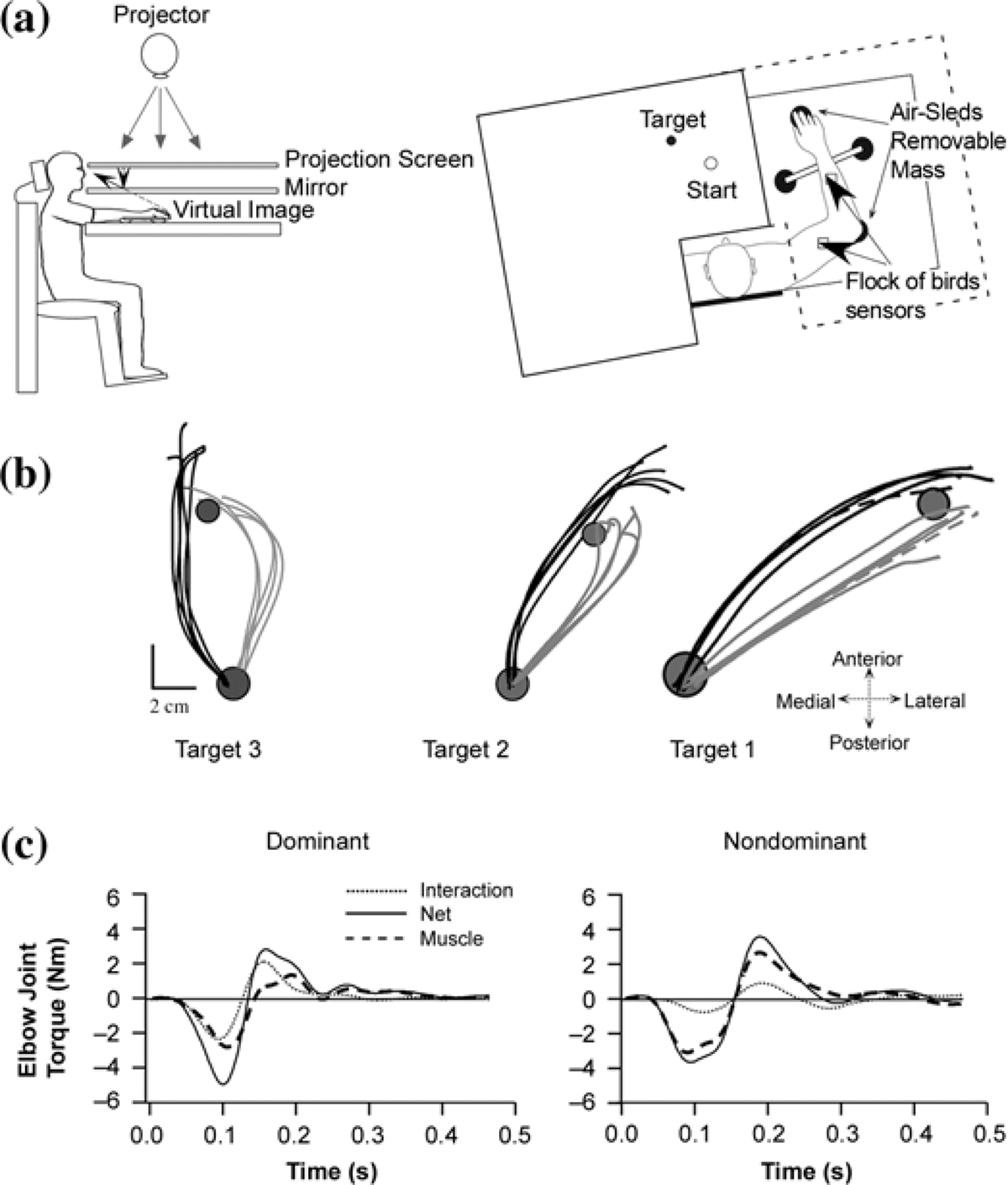
(a) Experimental setup. Side view (left), top view (right). Subjects sit facing a table, with arm supported on an air-sled. Targets and cursor representing finger position is projected onto a back-projection screen placed above eye level. A mirror, placed under this, reflects projection and provides a virtual task plane that appears to be at level of hand. Flock of birds, 6 degree of freedom sensors are attached to each limb segment. (b) Hand paths for nondominant (left arm: gray) and dominant (right arm: black) movements. Paths are presented in a right-hand coordinate system, such that dominant arm movements are presented in actual coordinates, whereas for nondominant arm, x-axis has been reversed. (c) Elbow joint torques for dominant and nondominant arm movements, depicted as dashed lines in Figure 1(b) (right side).