
Figure 5.
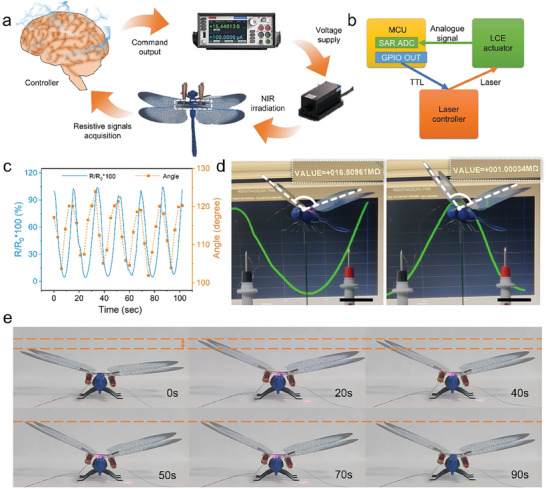
Demonstration of the application of PM‐LCE for self‐sensing. a) Schematic diagram of closed‐loop control. b) Principle of closed‐loop control of PM‐LCE is realized by MCU. c) Relative resistance of PM‐LCE and the angle of dragonfly's wings as a function of time. d) Application demonstration of the light‐driven dragonfly constructed by PM‐LCE. e) Optical images of dragonfly in a stable attitude during closed‐loop control.