
Fig. 4.
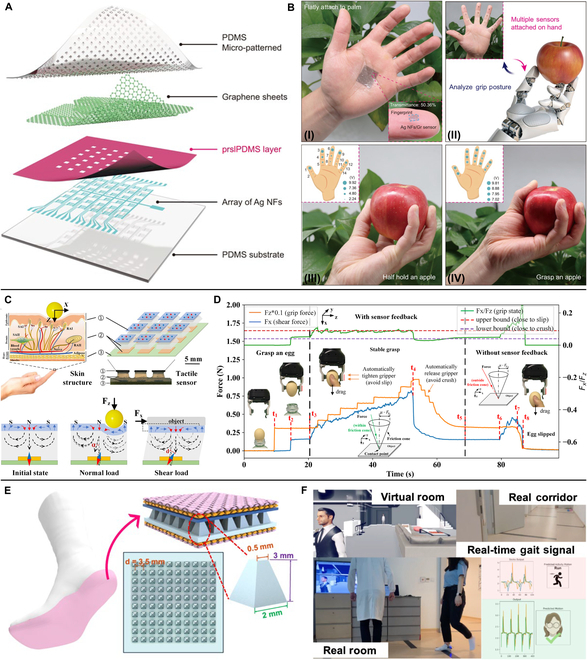
Tactile sensing devices of force sensors for VR applications. (A and B) Schematic illustration of the structure of pressure sensor arrays with micro-cage structures (A) and its application process (B). (I) Photographs of sensor arrays attached on palm. (II) Multiple sensors attached to the front of the finger to detect the different grasping postures. The voltage signal of the sensors at fingertip with a half hold apple (III) and fully grasped (IV). Reproduced with permission from [72]. Copyright 2023, Springer Nature. (C and D) Illustration of skin-inspired soft magnetic tactile sensor with working principle (C) and its application for an egg-grasping task (D). Reproduced with permission from [82]. Copyright 2021, the American Association for the Advancement of Science. (E and F) Schematic illustration of the intelligent sock sensor for monitoring plantar pressure (E) and the established digital human system with the sock senor (F). Reproduced with permission from [88]. Copyright 2020, Springer Nature.