
Fig. 7.
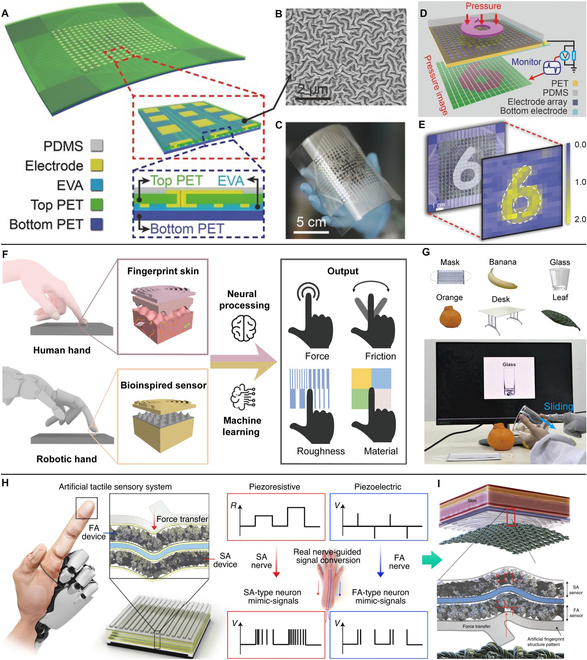
Tactile sensing devices of intelligent identification for VR applications. (A to E) Schematic illustration of a 16 × 16 pressure-sensitive triboelectric sensor matrix (A), SEM image of the etched PDMS surface microstructure (B), photograph of the sensor matrix (C), demonstration of the mapping output voltage of the sensor matrix under patterned pressure (D), and simulation results for the potential distribution (E). Reproduced with permission from [114]. Copyright 2016, John Wiley and Sons. (F and G) Schematic illustration of the biomimetic tactile system via a stick-slip sensing strategy (F) and the real-time object recognition system (G). Reproduced with permission from [116]. Copyright 2022, Springer Nature. (H and I) Schematic illustration of the artificial neural tactile sensing system (H) and the sensor responding to textured object (I). Reproduced with permission from [119]. Copyright 2021, Springer Nature.