
FIGURE 3.
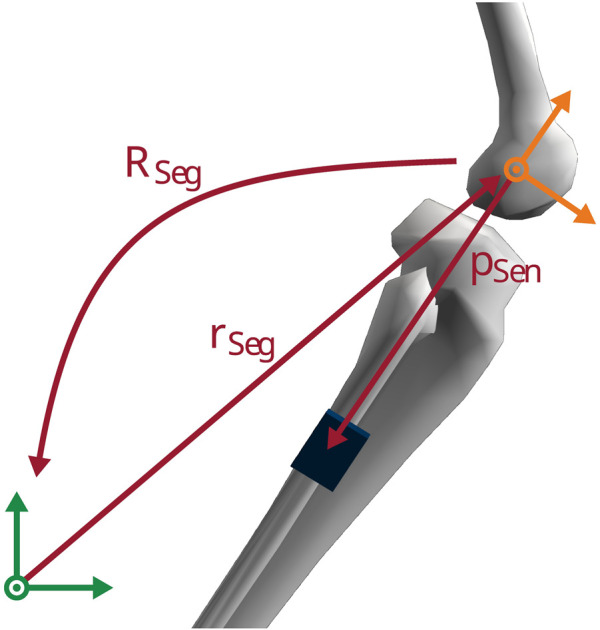
Representation of the inertial sensor model. The position of the virtual sensor p Sen was defined in the segment coordinate system (orange). The position of the segment origin r Seg and the segment orientation R Seg were defined in the global coordinate system (green).