
Figure 4.
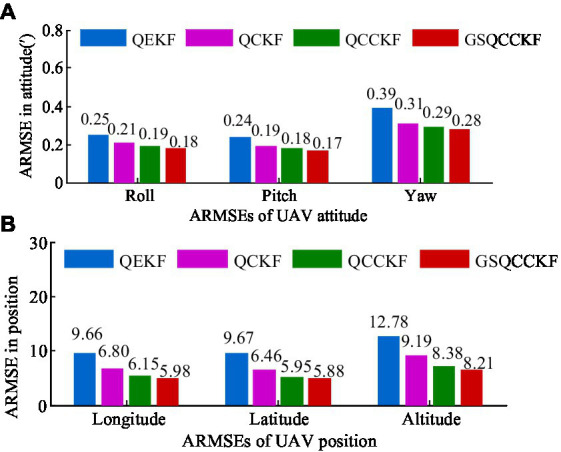
ARMSEs of the position and attitude obtained by four different algorithms for the white Gaussian noise scenario. (A) Attitude. (B) Position.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
ARMSEs of the position and attitude obtained by four different algorithms for the white Gaussian noise scenario. (A) Attitude. (B) Position.