
Fig. 4.
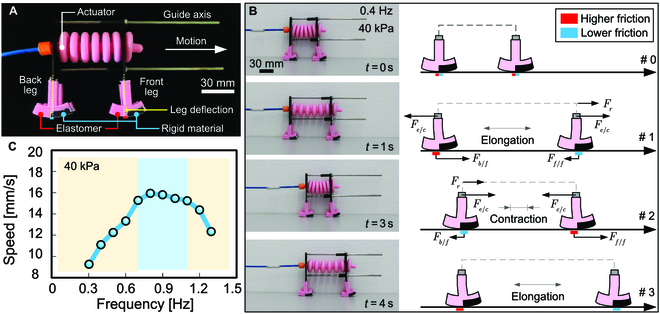
Earthworm-inspired soft robot. (A) Robot design composed of a linear pneumatic actuator and flexural legs with a convex shaped end made of 2 different materials. (B) Locomotion is generated by the elongation/contraction of the actuator combined with the state-dependent friction between the convex ends of its legs and the ground. (C) The effect of the on–off control frequency on locomotion speed. The speed was assessed by analyzing recorded videos varying the on–off control frequency.