
Fig. 5.
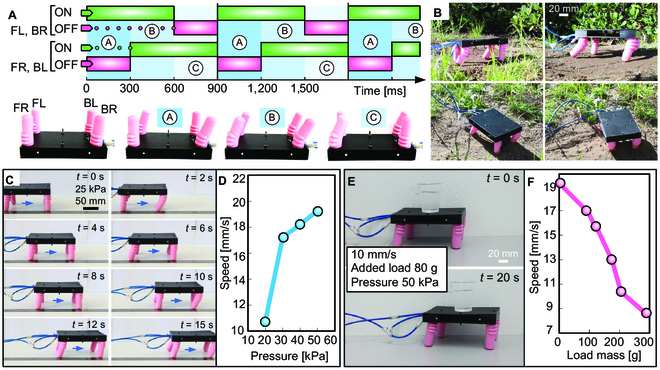
Conceptual design of a 4-legged robot inspired by quadruped animals. (A) Antisymmetric locomotion actuation pattern and related on–off signal diagram for each leg. The FL and BR legs are paired and operate in coordination, as do the FR and BL legs. (B) The robot walking on an unstructured garden flat surface. (C) Robot walking at various time intervals under an inner pressure of 25 kPa. (D) Robot walking speed as a function of the inner pressure. (E) Robot walking at a speed of 10 mm/s with an added load of 80 g. (F) Robot walking speed as a function of the load masses it carried at a constant pressure of 50 kPa.