
Fig. 3.
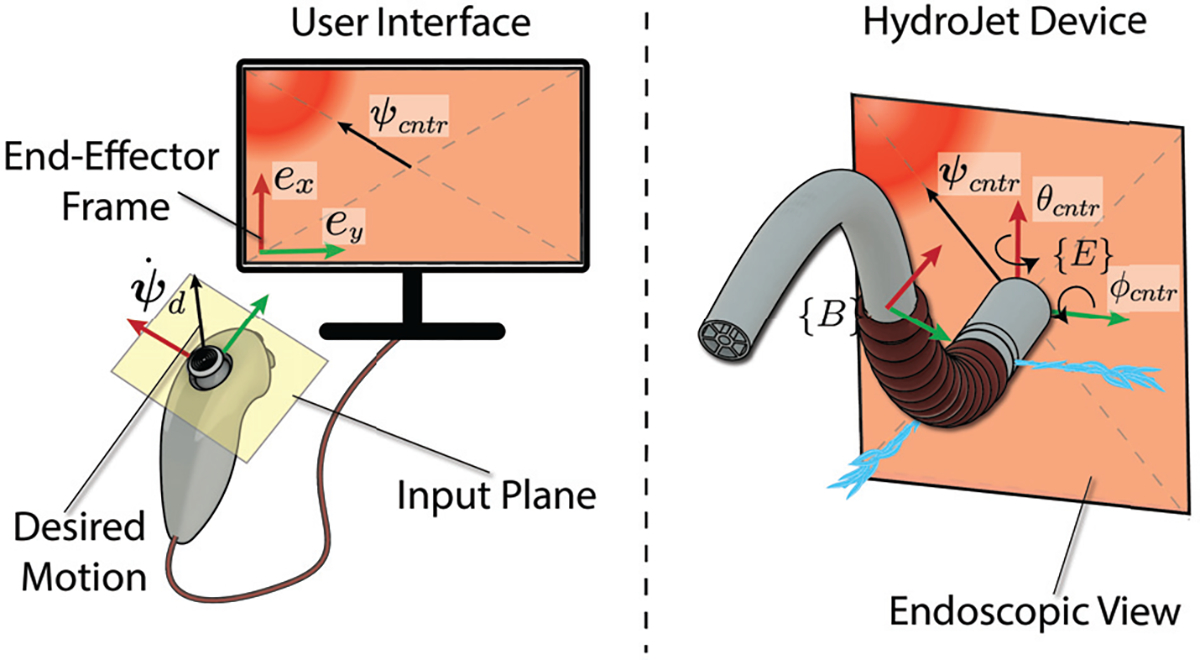
The rotation of the tip frame is commanded by summing the desired tip velocity obtained from the joystick to the orientation error obtained through inertial measurement units.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
The rotation of the tip frame is commanded by summing the desired tip velocity obtained from the joystick to the orientation error obtained through inertial measurement units.