
Fig. 2:
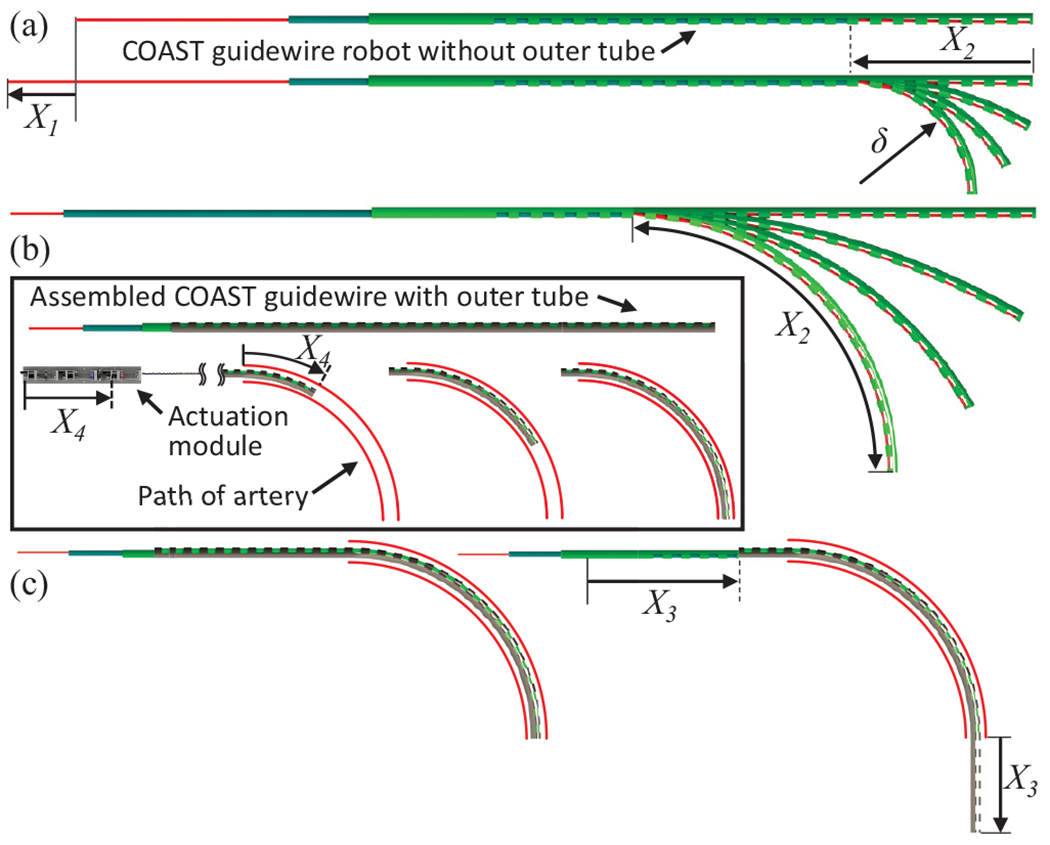
(a) Controlling the tendon stroke and joint length allows for variable curvature, (b) Controlling and while advancing the actuation module allows for follow-the-leader motion, (c) outer tube advanced individually to go further into a target vasculature, while retaining the curvature at the location of the vessel tortuosity.