
Fig. 3.
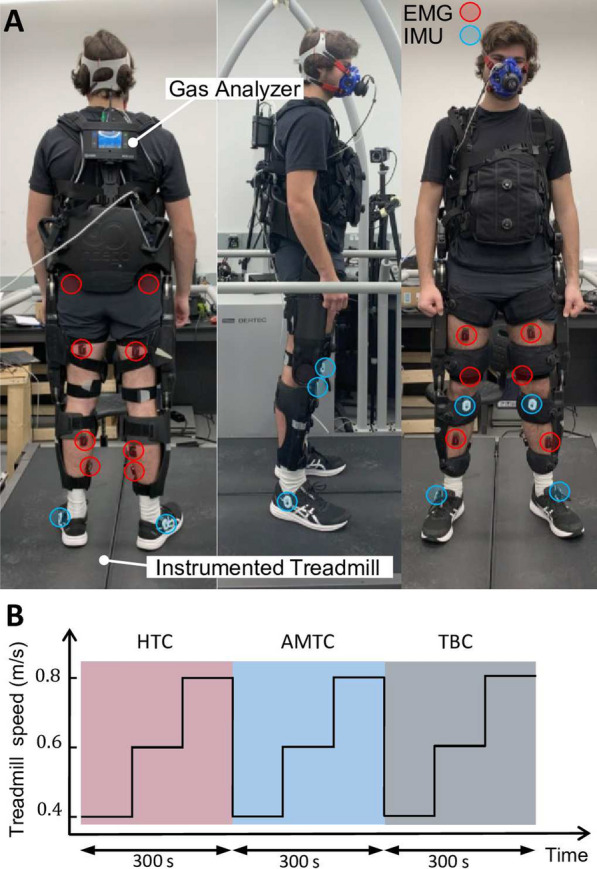
A Dorsal, lateral, and frontal view of a participant with the Indego exoskeleton with active hip and knee joints. The participant is standing on the Bertec treadmill with two speed-controlled belts equipped with individual loadcells underneath each of them for GRF monitoring. Muscle activation is measured from both right and left leg muscles using EMG sensors. Gait up IMUs are clipped to the outer side of the shoes, right below ankle joints to measure the spatiotemporal parameters of gait. Oxygen uptake of the participant is measured and recorded at each breath through a mask connected to the gas analyzer carried at the back of the participant. B Treadmill speed changes while experimenting with the HTC, AMTC, and the TBC controllers. The order of the controllers was specific to participant #9 and varied for other participants. Participants walked with each controller for 300 s divided by three 100-second walking periods during each the treadmill speed was set to 0.4, 0.6, and 0.8 m/s, respectively