
Fig. 3.
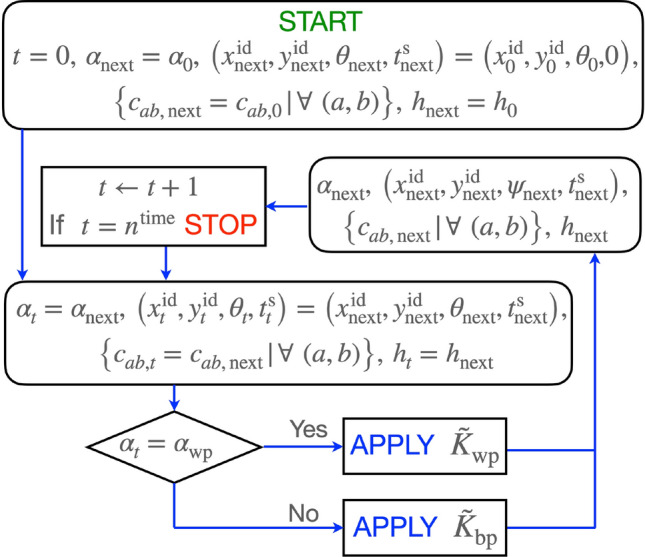
Algorithm used to simulate movement after the structural parameters (index t), (index a) and (index b) been entered, along with the topology of the landscape, the initial landscape values , the initial state value of the individual, and the parameter triplets and that define the two kernels and respectively. Implementations and require the specification of step-selection procedures and respectively. The latter employs an additional kernel that controls how the individual scans the landscape when it is moving between patches. The START, STOP, and APPLY commands, along with the flow arrows are show in different colors for additional clarity. The details of step selection procedures and can be found in Appendix A.3, SOF