
Figure 20.
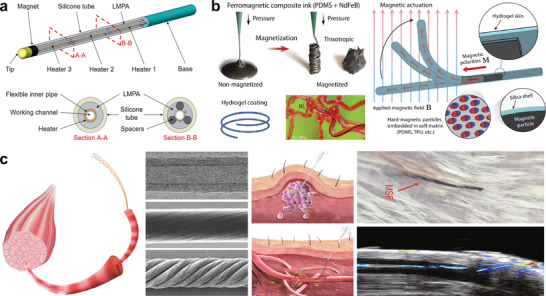
Fiber‐robots for biomedical applications in vivo. a) A magnetite remotely navigable multisegmented continuum fiber robot with controllable softness. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 374 ] Copyright 2019, The Authors, published by Wiley‐VCH. b) Hydrogel skin enabled self‐lubricating ferromagnetic fiber‐robot. Reproduced with permission.[ 375 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). c) An injectable helical‐CNTs‐yarn electrochemical sensor for multiple disease biomarkers monitoring in vivo. Reproduced with permission.[ 376 ] Copyright 2019, Springer Nature.