
Figure 4.
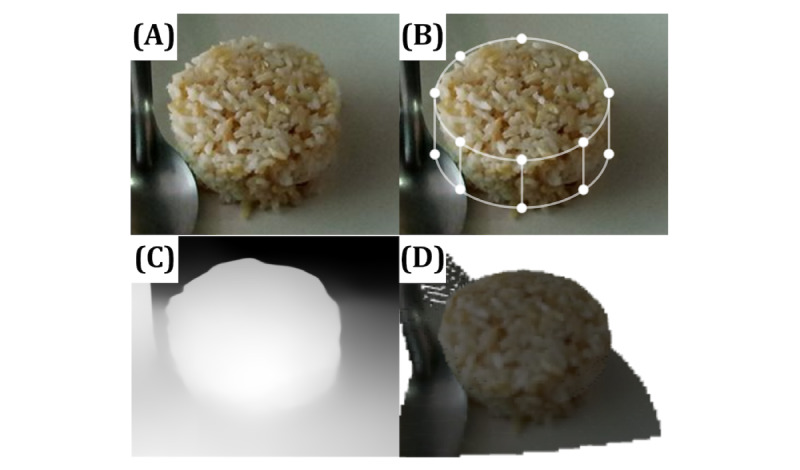
This figure demonstrates the various approaches to estimating food volume. (A) A cylindrical shape of 75 grams of brown rice taken from a 60° angle. (B) Geometric modeling with a predefined cylindrical shape, where the user needs to adjust each point manually to fit the object. (C) A predicted depth map from state-of-the-art dense prediction transformation. (D) A 3D reconstructed object using depth information from (C). These images have been adjusted in size for visual comparison purposes.