
Extended Data Fig. 1 ∣. PRANCE optimization.
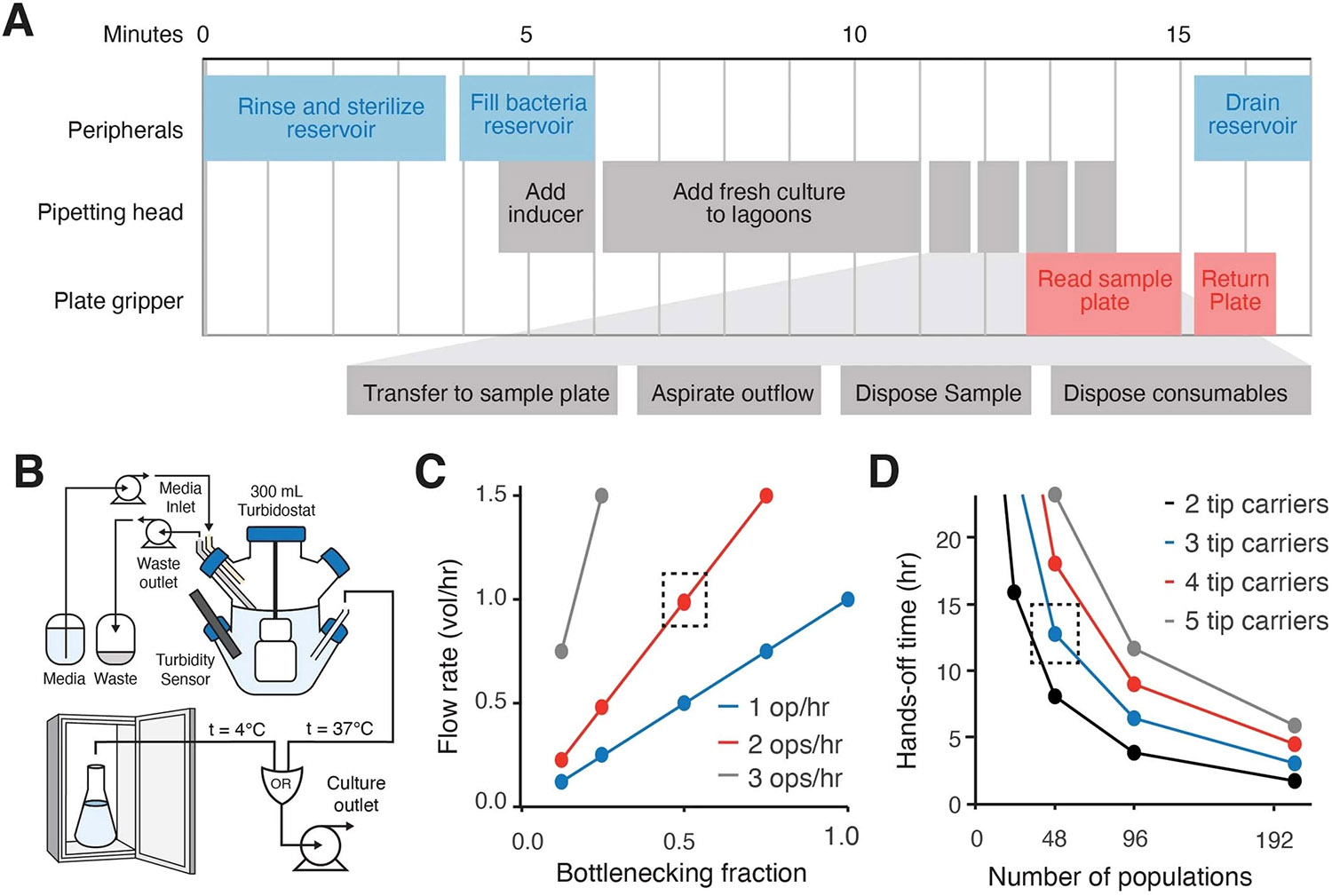
(a) Robotic manipulations operate in a loop, which repeats every 30 minutes. (b) Culture source fluidics (media, turbidostat/static culture, waste) are peripherally separated from the robot. The maximum flow-through rate is determined by the frequency with which the robot exchanges liquid (operations per hour), as well as the fraction of the standing volume of the population that is exchanged during each operation (the bottlenecking fraction). There is a trade-off between the maximum flow rate and the extent of bottlenecking. (c) The number of populations that can be serviced assuming 2 robot operations per hour (ops/hr) impacts the experimenter-free/hands-off operation time of the robot. (d) Larger robot decks can fit more tip carriers, more tips, and therefore require less frequent servicing.