
FIGURE 2.
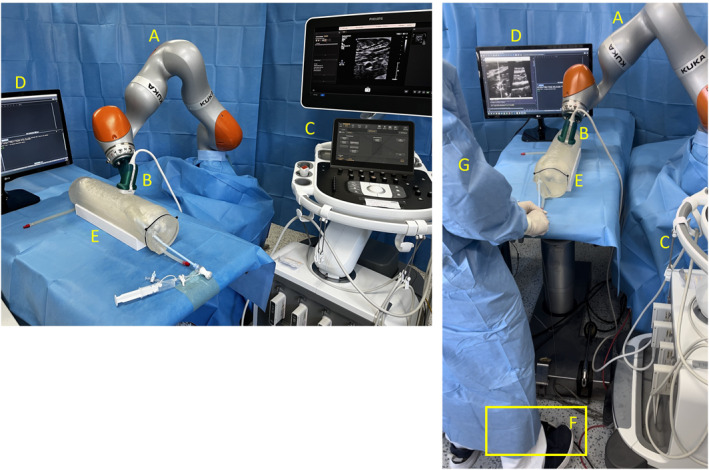
Experimental setup of the robotic‐guided ultrasound system for endovascular interventions including a foot switch for navigation. (A) Robot arm KUKA iiwa 14 LBR 820 with self‐designed 3D printed ultrasound probe holder (B); (C) Ultrasound system Philips Epiq 7; (D) monitor showing ultrasound image in two positions (cross‐section and longitudinal‐section); (E) ultrasound‐capable three‐dimensional vessel model; (F) foot switch Olympus RS31 controlling the robot arm; (G) interventionalist with both hands free for endovascular procedure.