
FIGURE 3.
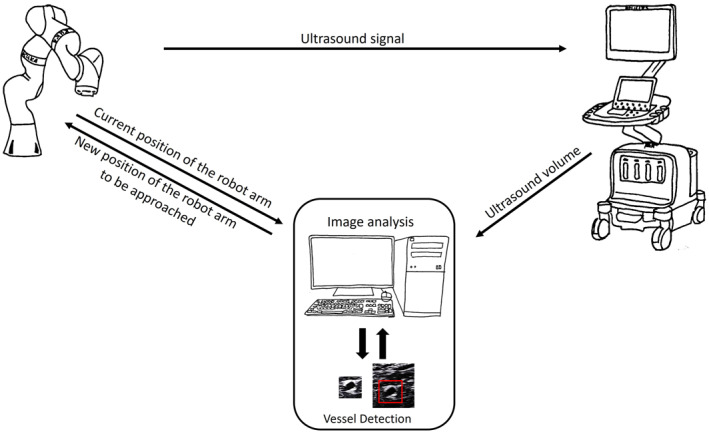
Setup of the robotic ultrasound system (RUSS) for the automatised pilot scan. The ultrasound volume from the ultrasound station is sent to a workstation for visualisation and vessel detection, performed using a template matching method. Once the template matching has been processed, the newly calculated position for the ultrasound probe is sent to the robot arm.