
FIGURE 5.
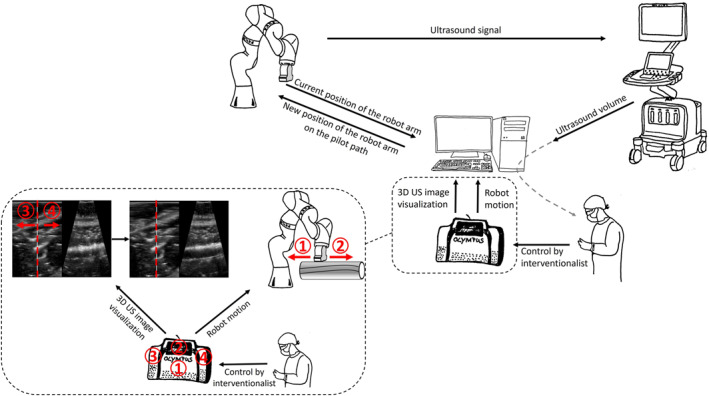
Set‐up of a RUSS equipped with a foot switch for the interventionalist to direct the robotic arm in endovascular procedures. The interventionalist can manipulate the robot's motion on the pilot path, forwards (2) and backwards (1), and adjust the 3D ultrasound image visualisation by correcting the cross section (red dotted line) of the vessel, left (3) and right (4). Technical term abbreviations, including ‘3D’, were explained upon first use.