
FIGURE 3.
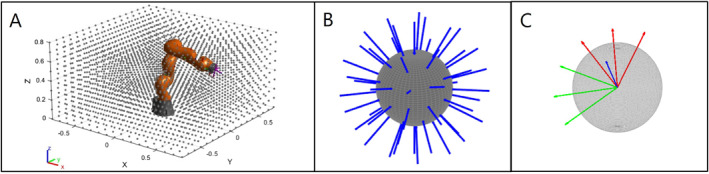
(A): Considered workspace of the robot, consisting out of 2601 positions represented by the centres of unit spheres. The dimensions of the workspace are , and , the resolution is 0.1 m. (B): 50 orientations of the ee ‐axis (shown in blue), defined by the direction from uniformly distributed points on the surface to the centre of the sphere. (C): Each of these 50 orientations is additionally rotated by 30° steps in a range from −180° to 150° to include all possible rotations around the ee ‐axis. To provide a better overview, only three rotations are shown. The ee ‐axes are red, while ee ‐axes are represented by green arrows.