
FIGURE 5.
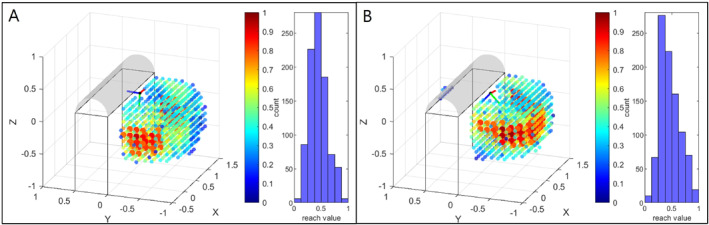
Visualisation of upright base positions for target pose 1 in scenario 1. (A) Shows the base positions without adapted tool geometry ( tcp ). The potential base positions are represented by coloured spheres, with the colour indicating the reachability value. The base positions with a value of more than 0.75 are shown as larger spheres. Moreover, histograms of the respective distributions are shown. The visualised coordinate systems consisting of a red x‐axis, green y‐axis, and blue z‐axis, represent the end effector target poses to be reached. In B, the distribution of base positions for the adapted tool geometry tcp , resulting in the maximum number of base positions with a reachability value > 0.75, is shown. Since an adapted tool geometry was used in B, the resulting flange target pose differs from A, where the reference geometry was applied without any rotation.