
FIGURE 7.
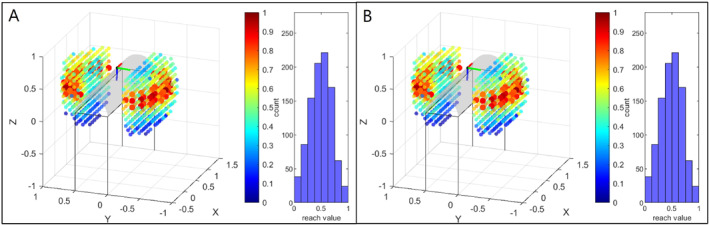
Visualisation of upright base positions for target pose 3 in scenario 1. In A, the distribution of base positions without adapted tool geometry ( tcp ) is presented. It can be seen that this is the same distribution as in B, where the distribution of base positions for the adapted tool geometry tcp , resulting in the maximum number of base positions with a reachability value > 0.75, is shown. Thus, for target pose 3, base positioning cannot be improved by an appropriate tool geometry.