
Fig. 1.
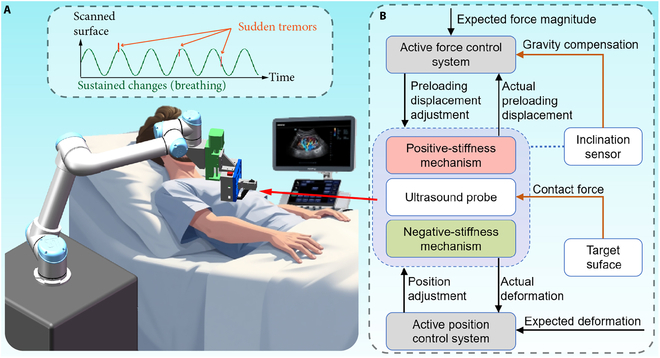
Schematic of the robotic ultrasound (US) scanning system. (A) Robotic arm for positioning the hybrid active–passive force control end-effector (HFCE) to the target scanned surface of the patient. (B) Flowchart of the working principle of the HFCE.