
Figure 4. Modeling of a multi-section soft robotic arm.
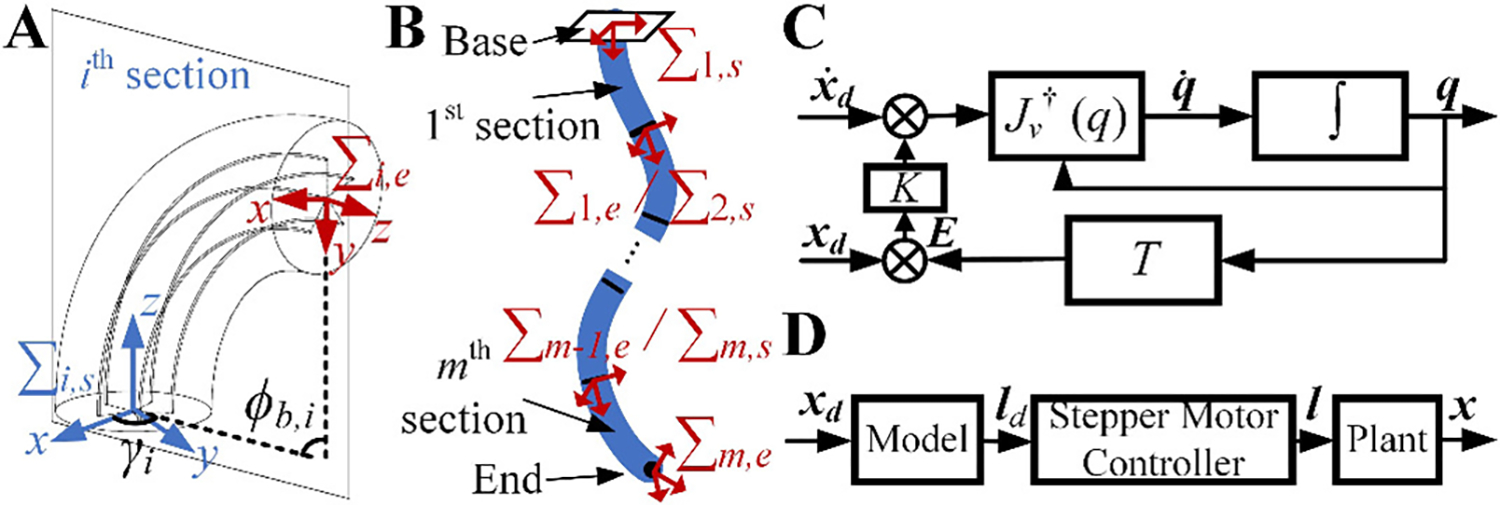
(A). Variables of bending configuration for one section. (B). Local frames for different sections. (C). The inverse kinematics solver for the bending configurations of different sections based on the reference of the end position. (D). Open loop control of the soft robotic arm based on the proposed model. and are the end position of the soft robotic arm and the actuation cable lengths, respectively, for which and are the corresponding target values.