
FIGURE 1.
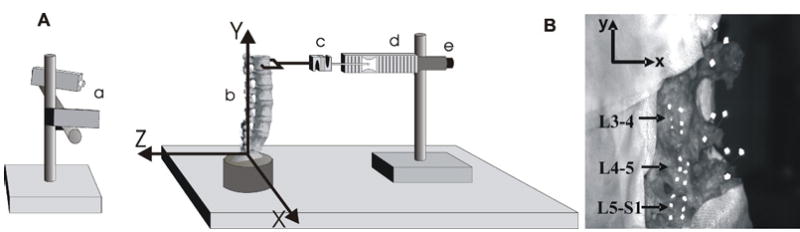
(A) Schematic of the experimental setup. (a) Two charge coupled device (CCD) cameras were used for optically tracking displacements of markers glued to the facet joint capsule surface and markers fixed to the tranverse processes of the vertebrae. (b) A human cadaveric lumbar spine specimen was fixed to the testing surface, with coordinate axes as shown. (c) A force transducer was used to measure the applied load. The loading apparatus consisted of (d) a displacement controlled linear actuator with (e) an optical position encoder for the determination of actuator position. B) Image of a typical lumbar spine specimen showing the location of the infrared reflective markers relative to the facet joint capsules and transverse processes. White cotton gauze moistened with saline is wrapped around the rest of the spine to minimize dehydration. Reflective markers (6 per capsule, each forming a 3 × 2 array) were adhered to the dorsal surfaces of the L3-4, L4-5, and L5-S1 facet joint capsules, and were used to calculate plane strains relative to the spatial coordinate system shown. Three noncollinear reflective markers were placed into each of the transverse processes from L3 to L5 and were used to calculate rigid body motion (6 degrees of freedom) of the same vertebrae.